Altair simülasyon yazılımlarını kullanarak ağır makine sistemlerinin analizi
İnşaat, madencilik ve tarımda kullanılan mobil ağır ekipmanların üreticileri, ürün geliştirme süreçlerinde çeşitli zorluklarla karşı karşıyadır. Bunlar özellikle pazardaki yeni oyuncular için geçerlidir:
• Yerleşik mobilite simülasyon yöntemleri basitleştirilmiştir ve çoğu zaman gerçek dünyadaki çalışma koşullarını tam olarak temsil etmez.
•Fiziksel testler, doğası gereği pahalıdır ve fiziksel bir prototipe güvenilmesi nedeniyle geliştirme döngüsünün ilerleyen dönemlerinde devreye alınması gerekir. Tekrarlanabilirlik, değişen toprak ve çevre koşulları nedeniyle bir endişe kaynağıdır.
• Yerleşik üreticiler tarafından kullanılan analitik yöntemler etkilidir ve onlarca yıllık ampirik bilgi birikimiyle oldukça gelişmiştir. Bu yöntemler tescillidir, genellikle yayımlanmazlar ve bu nedenle gelişmekte olan pazarlardaki yeni üreticiler tarafından kaldıraç olarak kullanılamaz.
Bu zorlukların üstesinden gelmenin cevabı, birden fazla fizik alanını kapsayan simülasyon odaklı tasarım kullanmaktır. Simülasyonun geliştirme sürecine sıkıca entegre edilmesi, özellikle otomotiv endüstrisinde, daha düşük yaşam döngüsü enerjisi ve işletme maliyetleri ile daha iyi performans gösteren daha sağlam bir tasarımla sonuçlanmıştır. Yeni nesil Altair simülasyon yazılımları, aşağıdakiler de dahil olmak üzere daha geniş bir araç sistemi ve çevresel etkileşim yelpazesini yakalayabilir:

- Hareketin 3D mekanik sistem temsili
- Yapıların 3D FE (sonlu eleman) temsili
- Toprak ve arazinin 3D DEM (ayrık eleman yöntemi) temsili
- Elektrik ve hidrolik kontrollerin 1D temsili
- Belirli fenomen veya fiziğin 0D matematik modelleri
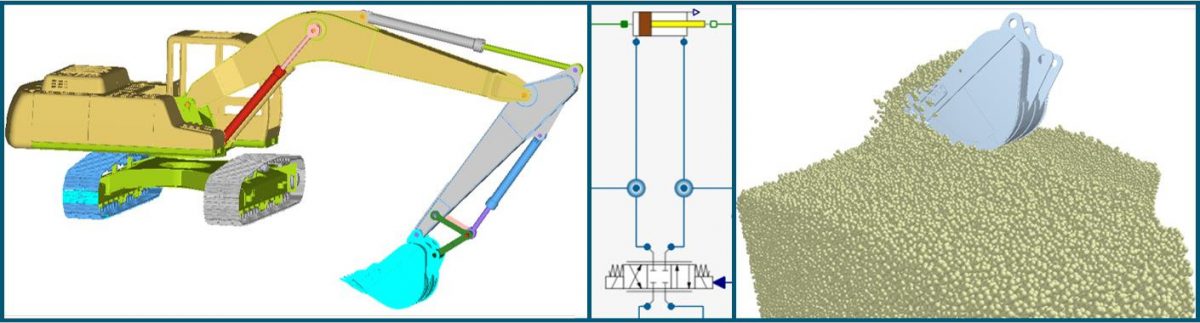
Bu bağlamda, bu yazının odak noktası, orta ölçekli bir hidrolik ekskavatörde kullanıcı düzeyinde bir iş akışını göstermektir. Ekskavatör, “Kamyon Yükleme Testi” adı verilen belirli bir nesnel doğrulama testine tabi tutulur. Sabit bir ekskavatör, bir yataktan toprağı alır ve belirli bir döngü süresi içinde bir kamyona boşaltır. Amaç kinematik, hidrolik sistem boyutlandırma, tasarım yükleri ve yapısal stresi incelemektir. Altair HyperLife ile sonraki yorulma değerlendirmeleri de hızlı bir şekilde yapılabilir.
Çalışmada kullanılan tüm yazılımlar ek ücret ödenmeden aynı lisansla ( patentli Altair UNIT lisans sistemi ) kullanılmaktadır
Aşağıda, kullanılan Altair simülasyon araçları ve iş akışı içinde oynadıkları rol listelenmiştir:
• Altair Inspire Motion –CAD’den mekanik sistem modelinin hızlı kurulumu
• Altair Activate – Hidrolik sistemlerin blok diyagram modeli
• Altair EDEM –Toprak/yapı etkileşiminin dökme malzeme modeli
• Altair HyperWorks | Altair Optistruct –Bom ve arm bileşenleri için esnek gövdenin hazırlanması
• Altair MotionView | Altair MotionSolve –Yukarıdakilerin tümünü birleştiren mekanik sistem entegrasyon ortamı
• Altair HyperWorks Post | Altair Compose – Kinematikleri, yükleri ve gerilimleri görselleştirme
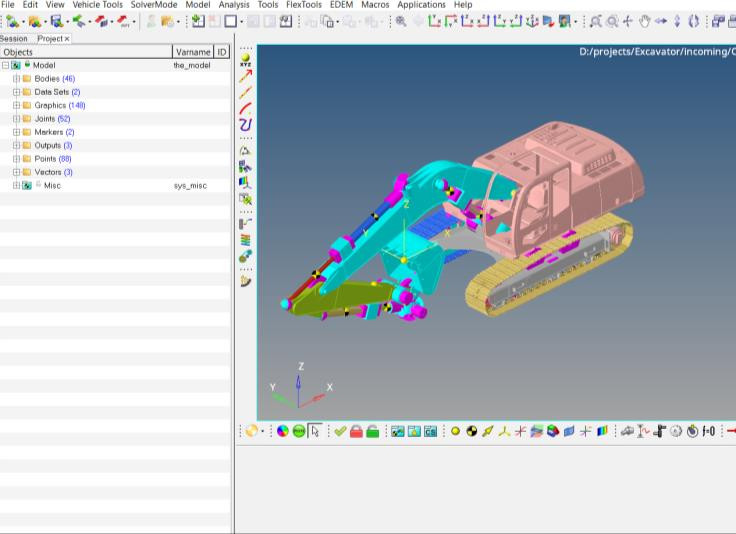
Inspire Motion Modeli ( Mekanik Sistem Simülasyonu)
Modelleme süreci, Inspire Motion içinde ekskavatörün basit işleyen bir modelini oluşturmak için mevcut CAD geometrisini kullanmakla başlar. Burada, daha ayrıntılı bir kurulum ve analiz için MotionView‘a aktarılmadan önce temel kinematik davranış için doğrulanır. MotionSolve çözücüsünü kullanan Inspire Motion, ekskavatörün ilk kurulumunu ve kinematiğini doğrulamak için hızlı ve kolay model organizasyonu, parça gruplaması, ortak oluşturma ve temel hareket atamalarına olanak tanır.
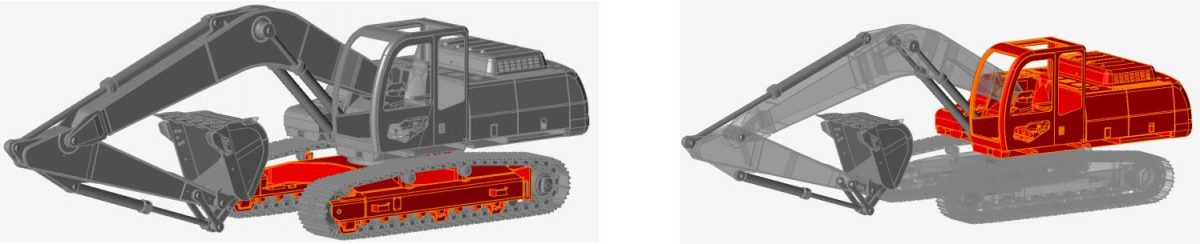
İlk olarak, hareket etmeyen parçalar zemin (grounded) olarak tanımlanabilir. Ardından, kabin montajının bileşenleri gibi aralarında bağıl hareketi olmayan parçalar Rijit Gruplar halinde düzenlenir. Rijit gruplar tek bir gövde olarak kabul edilir, ancak gruplanmış parçaların tüm kütlesi ve ataletleri toplu olarak dahil edilir. Bu, parçalara mafsal atama söz konusu olduğunda daha temiz ve daha organize bir modelin oluşturulmasına yardımcı olur.
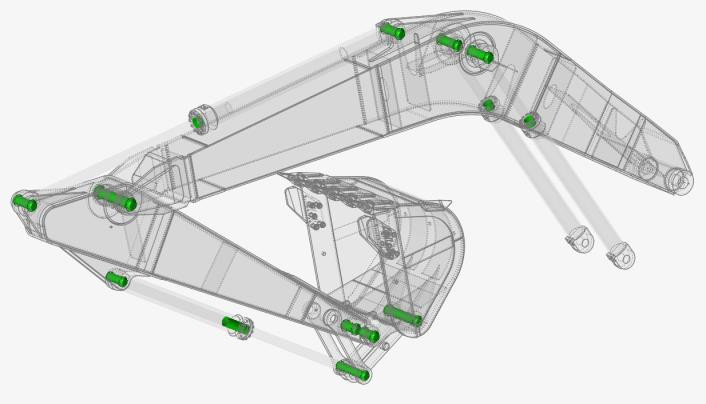
Ardından, Inspire Motion’ın otomatik bağlantı algılama özelliği kullanılarak hareketli parçalar arasındaki ve hareketli parçalar ile rijit gruplar arasındaki mafsallar eklenir. Bu özellik, iki hizalanmış delik veya bilye ve yuva gibi benzer geometri çiftlerini eşleştirmek için modeldeki CAD geometrisini kullanır ve birkaç bağlantının birkaç saniye içinde eklenmesine olanak tanır. Bunu takiben, tüm mafsallar uygun serbestlik derecesi atamaları için kontrol edilir.
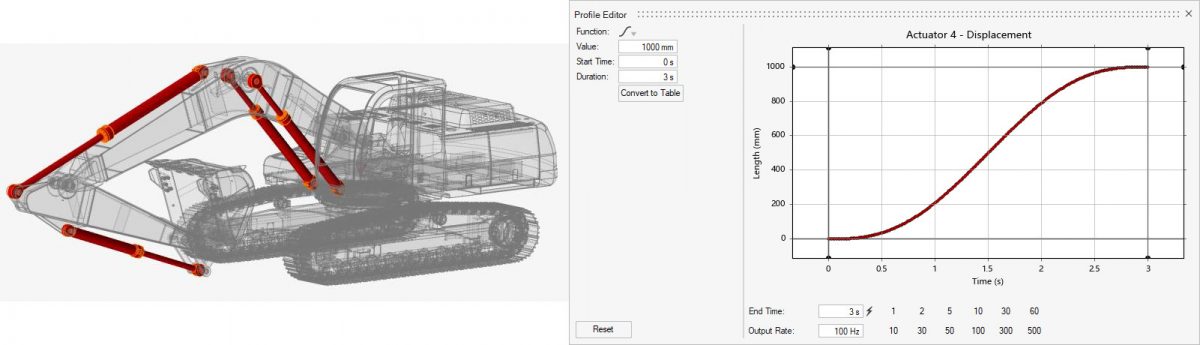
Inspire Motion “Aktüatörleri” her bir piston/silindir çiftine eklenir. Inspire Motion, piston/silindir çiftleri arasındaki mevcut silindirik mafsalları otomatik olarak bulur ve bunların doğrudan aktüatörlere dönüştürülmesine olanak tanır. “Profil Düzenleyici” kullanılarak, hareketi ve uygun mafsal bağlantılarını doğrulamak için her bir aktüatöre basit zamana bağlı yer değiştirmeler atanır.
Son olarak, kinematiklerin doğru çalıştığı doğrulandığında, model daha gelişmiş tanımlamalar için tek tuşla Altair MotionView’e aktarılır.
Altair MotionView Model ( Mekanik Sistem Simülasyonu)
Altair’in genel amaçlı mekanik sistem modelleme arayüzü MotionView, esnek gövdeler (flexbody), 1D FMU ve EDEM entegrasyonu gibi gelişmiş özelliklerin gerekli olduğu noktada iş akışına girmektedir. Kullanıcı burada hata ayıklama, alt sistemler oluştruma gibi işlemleri gerçekleştirebilir.
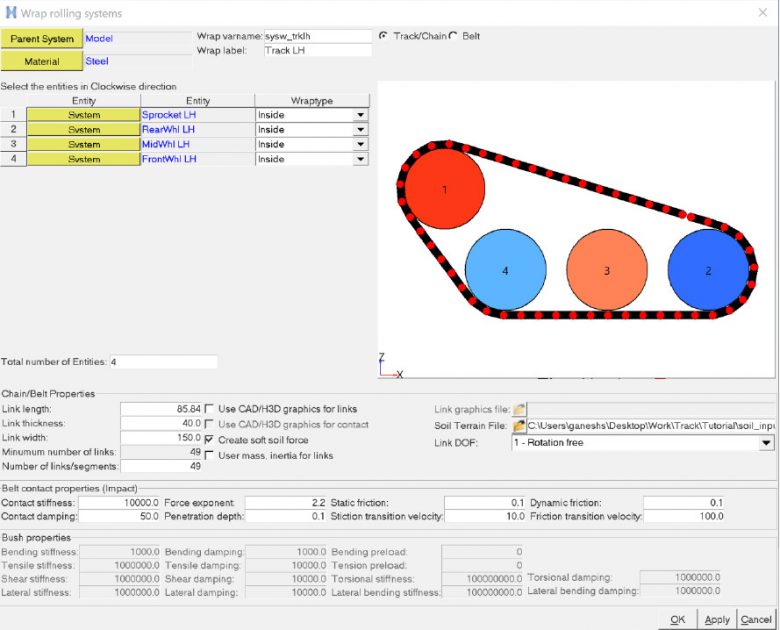
Ancak bu, kinematik olarak nispeten basit bir modeldir. Bu yazının amacı için seçilen olay (test), ekskavatörün bir yol veya toprak yüzeyi üzerindeki hareketliliğini içermediğinden, ekskavatörün kabini basitçe döner bir mafsal ile zemin (grounded) olarak modellenmiştir. Bu, salınmaya izin verir ancak diğer tüm DOF’leri kaldırır. Fiziksel test verileriyle ayrıntılı korelasyon için kullanıcı, MotionView’da (2021 ve daha yenisi) bulunan, arazi ve toprak özelliklerinin girişiyle birlikte palet bölümlerinin hızlı bir şekilde oluşturulmasına olanak tanıyan Track Toolkit‘i kullanmak isteyebilir. Bu, sadece hareketliliğe değil, aynı zamanda enerjinin (yüklerin) rijit bir mafsal yerine uyumlu bir zemin yüzeyine doğru dağılımına da izin verecektir.
1D hidrolik modeller oluşturulup entegre edilmeden önce, model, bom, kol ve kepçe silindirlerinin her birine uygulanan hareket kısıtlamaları ve ayrıca kaput kabininin dönüşü ile çalıştırılmıştır. Fiziksel test verilerinden silindir ve kabin yer değiştirmelerinin (konumlarının) filtrelenmiş zaman geçmişi, daha sonra hareket kısıtlamalarına atanan eğriler olarak girilmiştir..
Bu hareket kısıtlamaları faydalı bir amaca hizmet eder – hidrolik modelinin çalıştırıldığını doğrulamak için bir temel. Çözücünün mümkün olduğunca verimli çalışabilmesi için test verilerini okurken, çözücü ayarlarıyla eşleşen doğru örnekleme hızı, filtre ve enterpolasyon yöntemini seçmek önemlidir.
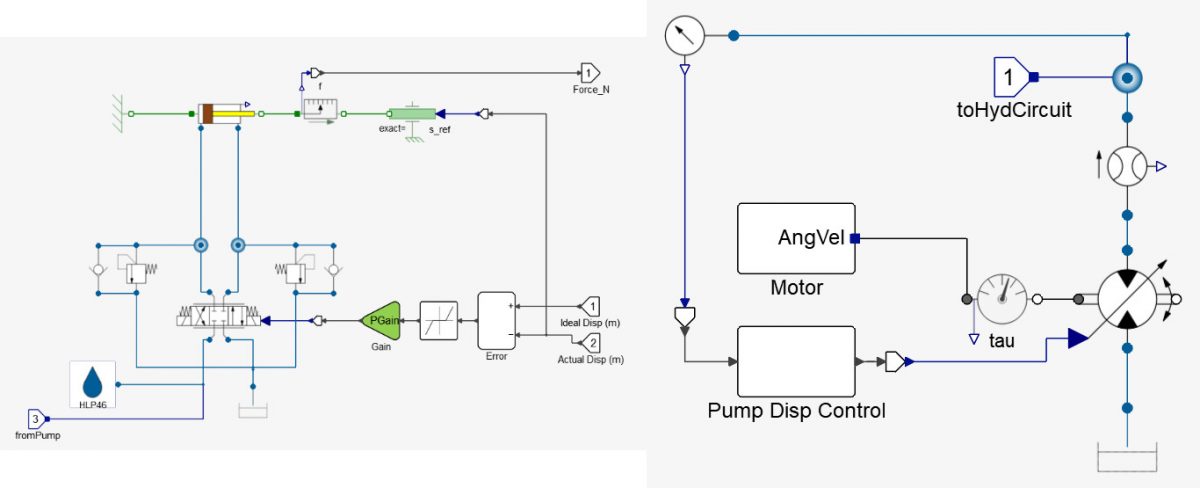
Altair Activate Modeli ( Hidrolik)
Hidrolik sistem, hidrolik kütüphane kullanılarak Altair Activate‘de modellenmiştir. Ticari bir ekskavatörden alınan bir hidrolik devre şeması tasarımın temelidir. Yalnızca bom, arm ve kepçenin çalıştırılması için gerekli bileşenler şematikte tanımlanır ve Activate sistem şemasında modellenir, yani:
• 2 motor
• 2 değişken deplasmanlı pompa
• 3 tek çubuklu hidrolik silindir
• 3 adet üç yollu oransal valf
• Tahliye ve çek valfler
Activate hidrolik sistemi oluşturulduktan sonra, ekskavatör mekanik sistem modeli, eş zamanlı simülasyon için Activate sistem modeline dahil edilir. Yüksüz, hidrolik performans, ticari ekskavatör tarafından belirlenen performans parametrelerine göre test edilebilir ve doğrulanabilir. Spesifik olarak, tam uzatma ve geri çekme için silindir hızları, fiziksel makinenin çalışma performansı ile korelasyonu doğrulamak için ölçülebilir.
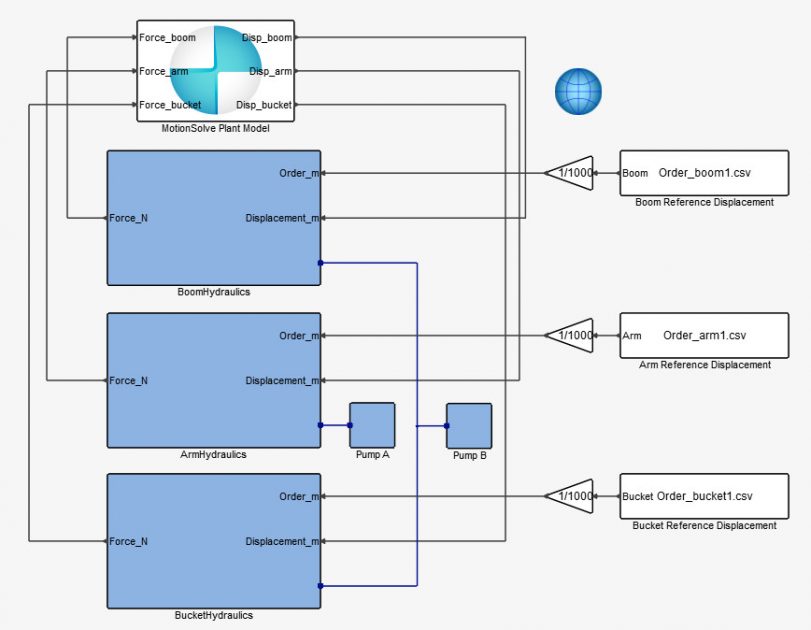
Bu eş zamanlı simülasyonda birincil araç olarak Activate ile, istenen tam sistem performansına ulaşmak için eğik plaka ve valf komut kontrolü gibi hidrolik sistem parametreleri gerektiğinde ayarlanabilir. Bununla birlikte, sonunda Altair EDEM ile eş zamanlı simülasyonda kullanılmak üzere hidrolik alt sistemin MotionView’a aktarılması gerekir. Hidrolikler, FMU (Functional Mock-Up Unit) olarak dışa aktarılır. FMU’nun girdileri ve çıktıları aşağıdaki gibi tanımlanır:
• Girişler: Bom, Arm ve Kepçe silindir yer değiştirmeleri.
• Çıkışlar: Bom, Arm ve Kova silindir kuvvetleri.
FMU, MotionView içerisine alınır, kuvvet sinyalleri her silindiri sürmek için bağlanır ve ekskavatör artık tam bir hidrolik sistemle tamamlanır.
EDEM Modeli (dökme malzeme) ve Eş Zamanlı Simülasyon
Çalışma sırasında ekskavatörün tam bir yük analizini elde etmek için doğru bir zemin modeli çok önemlidir. Genellikle ticari ağır ekipman tasarımında, dökme malzemenin sistem davranışı üzerindeki etkileri, fiziksel testlerle titizlikle ölçülür.
Ancak MotionSolve + Altair EDEM eş zamanlı simülasyonu ile bu süreç büyük ölçüde kolaylaştırılmıştır.
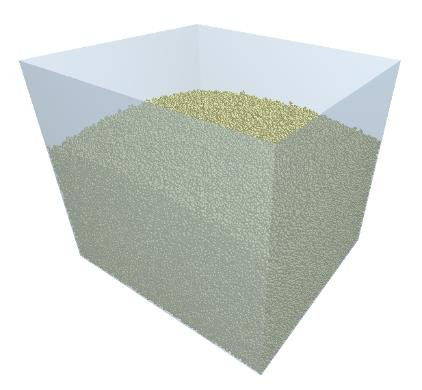
Ekskavatör geometrisini tanıtmadan önce, kepçe yüklemesi için uygun yerde bir toprak yatağı oluşturulmalıdır. Ticari ekskavatör spesifikasyonları, ekskavatör bomu, arm ve kepçenin tam olarak uzatılması için erişim değerleri sağlar. Bu değerler toprak yatağını uygun mesafede konumlandırmak için kullanılır. Tam kepçe yüklemesi için gereken zemin yatağının boyutları MotionView modeli yardımıyla belirlenir. Aktüatörleri ekskavatörün kazma döngüsü boyunca sürmek için uygulanan Hareketler ile gerekli toprak yatağı boyutları belirlenir. EDEM, dökme malzemeyi sanal bir kutu içinde üretir ve ardından MotionSolve ile arayüz oluşturmaya hazırdır.
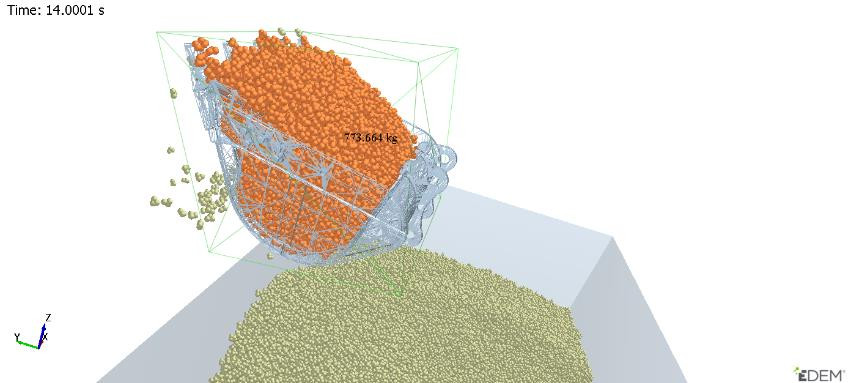
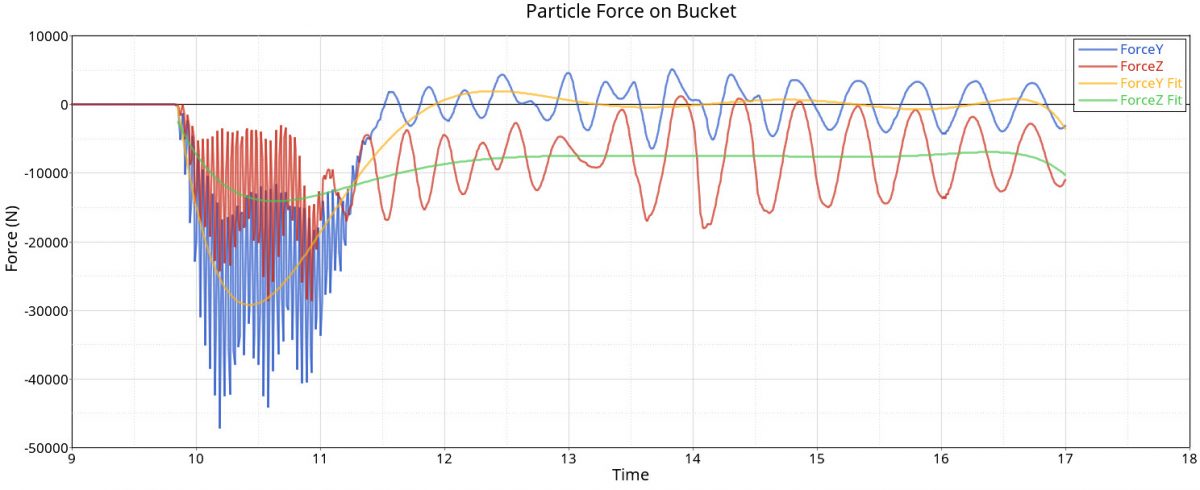
MotionSolve, geçici simülasyon sırasında kova ağırlık merkezine etki eden dökme malzeme kuvvetleriyle ilgili çıktı verileri sağlar. Parçacık davranışının analizinin gerekli olmadığı sonraki simülasyonlar için, bu kuvvet profili, dökme malzeme yükünün basitleştirilmiş bir temsilini uygulamak için uygun bir yoldur.
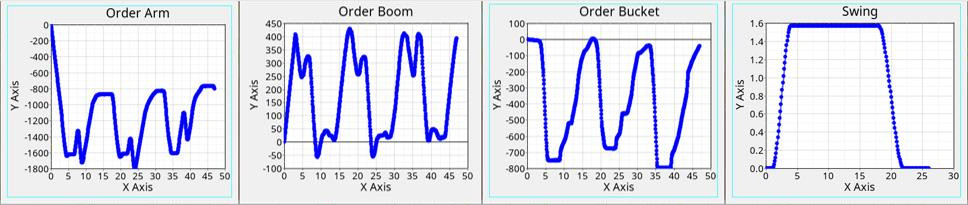
Bir hidrolik sistem modelini mekanik sistem simülasyonu modeline dahil etmenin birincil nedeni, alt sistemin çalışma sırasında performansını doğrulamaktır. Kamyon yük testimiz sırasında hidrolikler silindirleri sürmek ve dökme malzemeyi etkili bir şekilde taşımak için yeterli gücü üretemezse, yeniden boyutlandırma için bileşenlerin dikkate alınması gerekir. Bu performansı doğrulamamının ana yollarından biri, gerçek (ölçülen) silindir yer değiştirmelerinin ve istenen silindir yer değiştirmelerinin bir grafiğini görüntülemektir.
Hidrolik sistemin istenen sinyalleri oldukça yakından takip etme yeteneği, hidrolik pompaların, valflerin ve silindirlerin bu ekskavatörün kamyon yükleme rutini için etkili bir şekilde boyutlandırıldığını doğrular.
Bom ve kol üzerindeki çeşitli konumlar için asal gerilmeler, MotionSolve sonucundan (.h3d) bastırılır. Birden çok yinelemeyi tekrar tekrar çizmek için bir rapor şablonu tanımlanır. Ek olarak, kullanıcı gereksinimlerine göre MBD modelde mevcut konumlarda yer değiştirme, hız, ivme veya yükleri bastırılabilir.
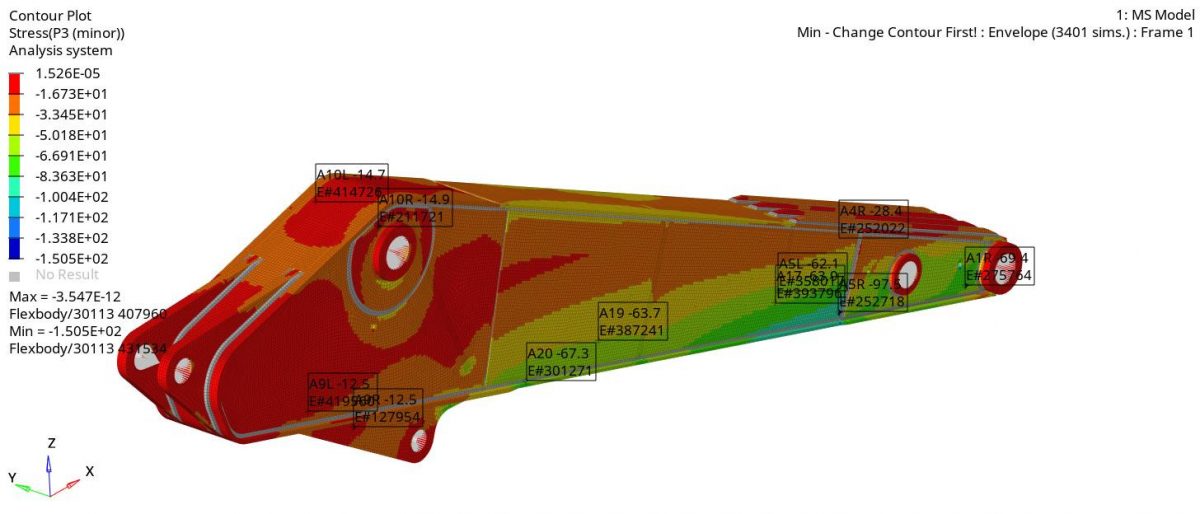
Sonuçların sonradan işlenmesi, CAE çıktı dosyalarını okumak ve matematik işlemlerini verimli ve sağlam bir şekilde yapmak için Altair Compose matris tabanlı nümerik hesaplama dili ve ortamı kullanılarak otomatikleştirilebilir. MotionSolve’den (.h3d) elde edilen çıktı, farklı zaman adımları için esnek gövdeler üzerindeki belirli öğelerde stres sonuçları –P1 Major ve P1 Minor – çıkaran “readcae” fonksiyonuyla Altair Compose’da okunur.
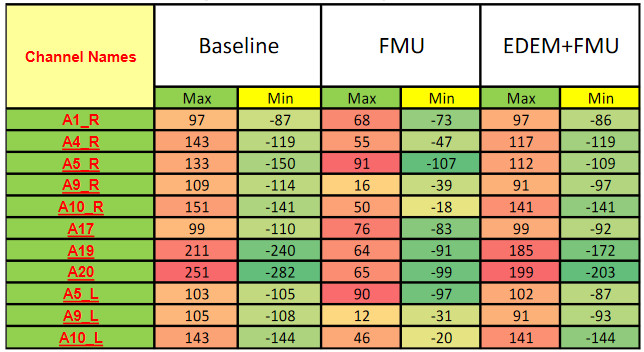
Tablo, 3 modelden elde edilen sonuçları göstermektedir:
• Baseline –Zaman geçmişi ve hareket kısıtlamaları tarafından harekete geçirilen silindirler ile temsil edilen kazı kuvveti
• FMU – Zaman geçmişi ve 1D hidrolik FMU tarafından çalıştırılan silindirlerle temsil edilen kazı kuvveti
• EDEM+FMU – EDEM’den gelen kazma kuvveti ve 1D hidrolik FMU tarafından çalıştırılan silindirler
Sonuç
Burada gerçekleştirilen gibi bir çoklu fizik eş zamanlı simülasyonu, ağır makine ve tarım endüstrilerindeki üreticiler için büyük bir değere sahiptir, aksi takdirde hantal ve pahalı test prosedürlerine veya idealden daha geniş varsayımlara sahip analitik yöntemlere kullanılmak zorunda kalınır. Sistemlerin sistemi yaklaşımı, mühendislerin alt sistem düzeyinde tasarım seçimleri yapmasına ve bu değişikliklere dayalı bütünsel performans gelişimini ölçmesine olanak tanır. Bileşen boyutlandırmadan dayanıklılık çalışmalarına kadar, bunun gibi eş zamanlı simülasyonlar, tam sistem davranışını anlamak ve karmaşık sistemlerle ilgili bilinçli, güvenilir tasarım kararları vermek için çok önemlidir.