Taşıt Dinamiği Simülasyonlarında Yapay Zeka Kullanımı
Kamyon vb. araçların taşıt dinamiği simülasyonu binek otomobillerine göre uzun sürmektedir. Bunun nedeni yaprak yay süspansiyon içermesidir. Peki yaprak yay nedir ve çözdürülmesi neden zaman alır ?

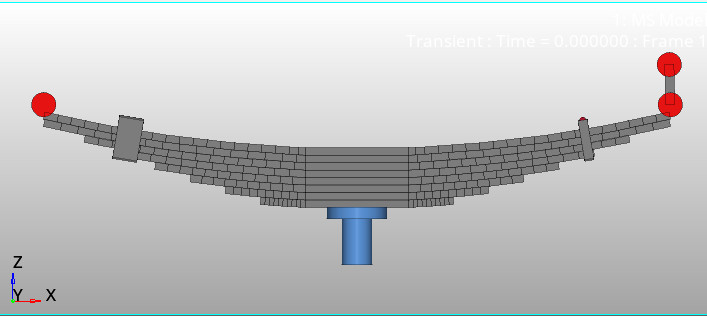
Altair MotionSolve yaprak yay modeli oluşturmak için bir araca sahiptir. Bu araçta yaprak yayı önce yaprak sonra gövdelere ayrılır. Malzeme davranışını modellemek için değişen kalınlık ve genişliğe sahip kiriş elemanları ,yapraklar arası temas ve sürtünmeyi modellemek için 3D temaslar (contact) kullanmalıyız. Bir yaprak yay oluşturmak için girmemiz gereken parametre sayısı gördüğünüz gibi oldukça fazla. Bir yaprak yayı bir test donanımına koymadan ve ondan bir Kuvvet-Yer değiştirme eğrisi çıkarmaya çalışmadan önce bir yaprak yay oluşturmak çok zaman alacaktır.
Diğer zaman alan işlem yol tutuş manevralarıdır. Bir manevrayı çözdürmek yaklaşık 15 dakika sürüyor ve bunlardan 15’den fazlasını gerçekleştirmemiz gerekiyor. Üstelik bu tekrarlamalı bir süreçtir.
Her iki süreç için mühendislere zaman kazandıracak çözüm, makine öğrenimi tabanlı bir araç olan Altair romAI‘dır.
Altair romAI
Bu uygulama, verilerden yeniden kullanılabilir sürekli dinamik modeller oluşturmak için Yapay Zeka ve sistem modelleme tekniklerini birleştirir ve zaman açısından son derece verimlidir. Bu modeller, sistem tasarımı ve optimizasyon analizlerini hızlandırmak için indirgenmiş modeller veya bu örnekte olduğu gibi gerçek zamanlı Dijital İkizler ve kontrol uygulamalarında temel olarak kullanılabilir.
Araç esas olarak şunlardan oluşur:
- Hem Altair Compose hem de Altair Activate‘de bulunan romAI üretimi için kullanılan bir arayüz (GUI).
- Altair Activate‘de bulunan, oluşturulan romAI’nin kullanımını sağlayan bir blok.
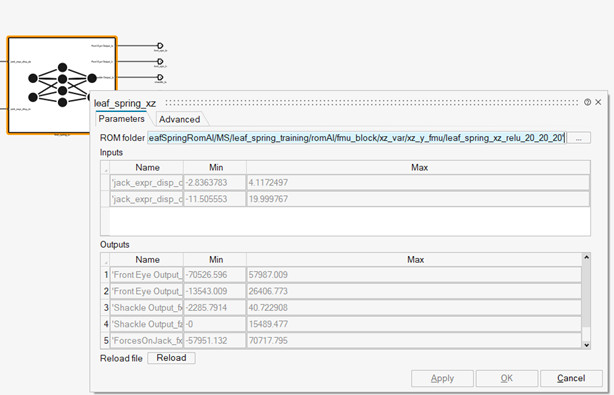
romAI bloğu doğrudan Altair Activate‘de kullanılabilir ve bir FMU veya dll formatında dışa aktarılabilir.
Bir yaprak yay süspansiyonun indirgenmiş modelini (romAI tabanlı) oluşturmayla ilgili adımlar aşağıdaki resimde gösterilmektedir.
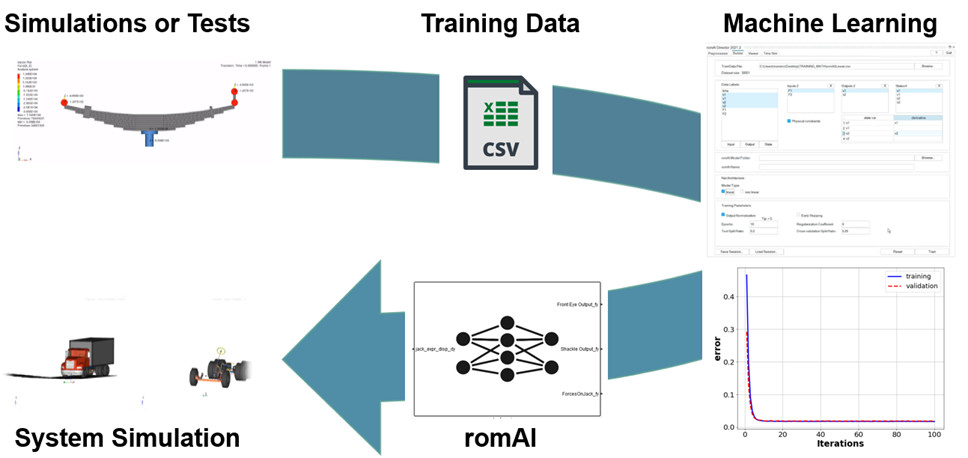
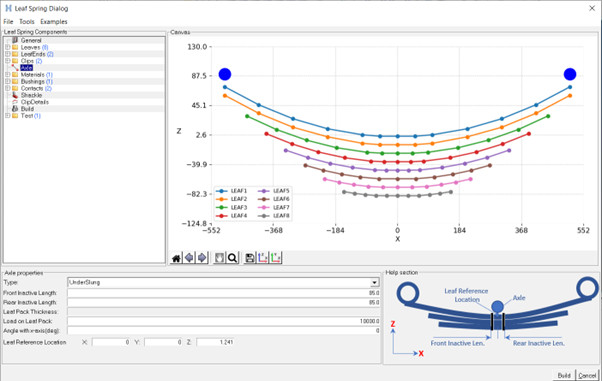
1-) Altair MotionSolve’deki test rig kullanarak eğitim veri seti oluşturun.
Bu adım, eğitim veri setinin oluşturulmasına geçmeden önce bazı soruların cevaplanmasını gerektirir.
Yaprak yay süspansiyonda hangi verileri yakalamaya çalışıyoruz? Bir yaprak yay süspansiyonun indirgenmiş modelinin girdileri ve çıktıları nelerdir? Ve ne ölçüde test etmemiz gerekiyor?
Yaprak yay küpesiyle birlikte yaprak yığınını sistemimiz olarak düşünelim ve bu sisteme girişleri, çıkışları kontrol edelim.
Girişler – Aksın X, Y ve Z yönü boyunca yer değiştirmesi.
Çıktılar – X, Y ve Z ekseni boyunca kuvvetler
Sisteme toplam 3 giriş ve sistemden 9 çıkış bulunmaktadır. Eğitim veri setini oluşturmak için Altair MotionSolve‘da yaprak yay test düzeneğini kullanıyoruz ve aksı/krikoyu X, Y ve Z yönünde hareket ettirerek birkaç test gerçekleştiriyoruz. Yaptığınız testlerin gerçek dünya senaryosunu (tek şerit değiştirme, sabit yarıçap, düz hat frenleme vb. manevralar sırasında dingil hareketini düşünün)içerdiğinden emin olun çünkü bu senaryolar üzerinde eğitilen ML modeli görmediği sonucu üretemez.
Şimdi eğitim veri setimizi csv formatında aldık ve şimdi bu veri setini kullanarak romAI modelini eğitmemiz gerekiyor.
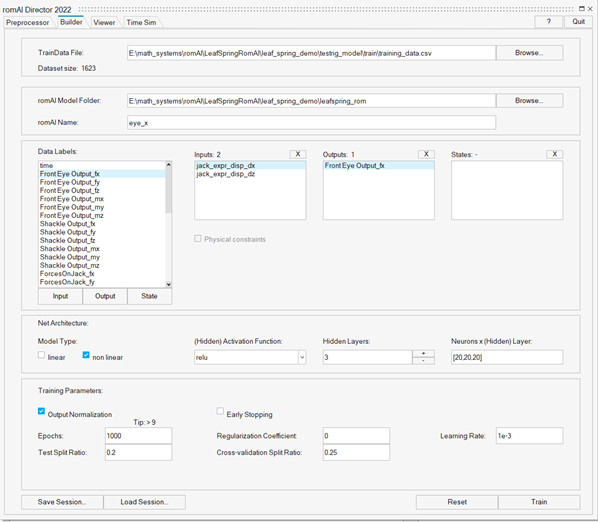
2-) romAI modelini eğitin
X, Y, Z bileşenlerini ayrı ayrı eğitmeyi faydalı bulunmuştur.
3-) romAI modelini test edin
Test 3 aşamada yapılır. Testin yanı sıra romAI modelimizi bir yol tutuş manevrasında kullanıma uygun olacak şekilde ayarlayacağız:
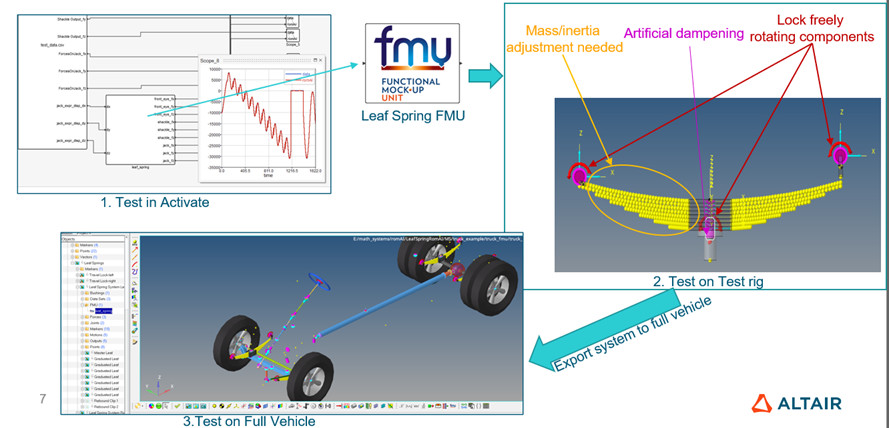
1-) Eğitim veri setinde yaprak yay ROM’unun tahminlerini test edin ( Altair Activate‘de csv bloğunu kullanın ). Süper bloğun sonuçları çıkışlara yakınsa, ikinci testimiz için MotionSolve içinde kullanılmak üzere bu yaprak yay ROM’unun bir FMU’sunu oluşturabiliriz.
2-) Bu test, eğitim veri seti oluşturmak için kullandığımız aynı test donanımı üzerinde, ancak ROM’un genelleme kapasitesini kontrol etmek için farklı giriş sinyalleri kullanılarak yapılır.
Aksa hareket sağlayarak testi çalıştırıyor ve çıkış kuvvetlerini karşılaştırıyoruz. Bu aşamada, yaprak yay süspansiyon davranışına daha iyi uyması için bazı yapay sönümleme ekleyerek romAI modelimizi değiştirebiliriz.
3-) Dolu bir kamyon modelinde ilave sönümleme ile yaprak yayı ROM’u kullanın.
Sonuçlar
- Performans kazancı, kiriş (beam) tabanlı yaprak yay süspansiyona kıyasla yaklaşık 30 kat olmuştur.
- Eğitim veri seti oluşturmak için sadece 3 test gerekliydi (yaklaşık 20 dakikalık eğitim süresi).
- Bu işlem otomatikleştirilebilir.
Bu çalışmada kullanılan tüm yazılımlar aynı lisansla kullanılmaktadır. Detaylı bilgi almak için bizimle iletişime geçebilirsiniz.